
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ເທັກໂນໂລຍີການຫຼອກລວງການນໍາທາງ Drone
ການຫຼອກລວງການນໍາທາງເປົ້າຫມາຍ drones ໂດຍທົ່ວໄປຫມາຍເຖິງການນໍາໃຊ້ວິທີການດ້ານວິຊາການສະເພາະໃດຫນຶ່ງເພື່ອສັກຢາກໍານົດປອມຂໍ້ມູນການນໍາທາງໄພຂົ່ມຂູ່ທີ່ບໍ່ຖືກຕ້ອງເຂົ້າໄປໃນ drones ຜິດກົດຫມາຍ, ເຮັດໃຫ້ລະບົບນໍາທາງດາວທຽມຂອງ drone ຂອງຕົນເອງກໍານົດຕໍາແຫນ່ງຂອງຕົນບໍ່ຖືກຕ້ອງ, ແລະດັ່ງນັ້ນຈຶ່ງເຮັດໃຫ້ການວາງແຜນເສັ້ນທາງທີ່ບໍ່ຖືກຕ້ອງແລະການຄວບຄຸມການບິນ, ດັ່ງນັ້ນຈຶ່ງບັນລຸໄດ້. ຈຸດປະສົງຂອງການຂັບໄລ່ drone ຫຼືການບັງຄັບລົງຈອດຢູ່ສະຖານທີ່ກໍານົດ. ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າ drones ຕົ້ນຕໍໃນປະຈຸບັນໃຊ້ລະບົບນໍາທາງດາວທຽມທົ່ວໂລກ(GNSS) ເປັນແຫລ່ງຂໍ້ມູນການນໍາທາງຕົ້ນຕໍຂອງພວກເຂົາ, ເຕັກໂນໂລຢີການຫຼອກລວງການນໍາທາງເກືອບສາມາດສົ່ງຜົນກະທົບຕໍ່ drones ທັງຫມົດ, ໂດຍສະເພາະແມ່ນ drones ພົນລະເຮືອນ, ແລະມີການນໍາໃຊ້ທີ່ດີ. ໃນການປະຕິບັດຕົວຈິງ, ອຸປະກອນຄໍາແນະນໍາການນໍາທາງ drone ພື້ນຖານໂດຍທົ່ວໄປຈະປ່ອຍສັນຍານນໍາທາງ pseudo ທີ່ມີຄວາມຄ້າຍຄືກັນກັບສັນຍານ GNSS ຂອງ drone ທີ່ແທ້ຈິງ, ບັງຄັບໃຫ້ຜູ້ໃຊ້ທີ່ກ່ຽວຂ້ອງໄດ້ຮັບແລະຄິດໄລ່ສັນຍານນໍາທາງ pseudo ດັ່ງກ່າວຢູ່ທີ່ຈຸດຮັບ, ດັ່ງນັ້ນຈຶ່ງເຮັດໃຫ້ drone ໄດ້ຮັບທີ່ບໍ່ຖືກຕ້ອງ. ຂໍ້ມູນຕໍາແຫນ່ງ, ຄວາມໄວ, ແລະເວລາພາຍໃຕ້ເງື່ອນໄຂປິດບັງແລະບໍ່ສາມາດກວດພົບໄດ້ຢ່າງມີປະສິດທິຜົນ. ມັນຄວນຈະຊີ້ໃຫ້ເຫັນວ່າການຫຼອກລວງການນໍາທາງແມ່ນແຕກຕ່າງຈາກການແຊກແຊງການນໍາທາງ. ການແຊກແຊງສະກັດກັ້ນການນໍາທາງໂດຍທົ່ວໄປໃຊ້ jammers ທີ່ມີພະລັງງານສູງເພື່ອສົ່ງສັນຍານສະກັດກັ້ນປະເພດຕ່າງໆ, ເຮັດໃຫ້ຜູ້ຮັບເປົ້າຫມາຍບໍ່ສາມາດຮັບສັນຍານນໍາທາງປົກກະຕິໄດ້, ແລະຜູ້ໃຊ້ບໍ່ສາມາດໄດ້ຮັບຜົນການນໍາທາງ, ຕໍາແຫນ່ງແລະເວລາ, ເຮັດໃຫ້ລະບົບນໍາທາງບໍ່ສາມາດໃຊ້ໄດ້. ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າການຫຼອກລວງການນໍາທາງມັກຈະບໍ່ຕ້ອງການພະລັງງານສາຍສົ່ງທີ່ເຂັ້ມແຂງເກີນໄປ, ມີການປິດບັງທີ່ດີ, ແລະສາມາດນໍາພາຜູ້ໃຊ້ທີ່ກ່ຽວຂ້ອງນໍາທາງໃນທາງທີ່ບໍ່ຖືກຕ້ອງໃນລະດັບໃດຫນຶ່ງ, ນີ້ຍັງເຮັດໃຫ້ການຫຼອກລວງນໍາທາງມີຜົນກະທົບທີ່ດີໃນການປະຕິບັດ.


ໃນປັດຈຸບັນ, ມີສອງເຕັກໂນໂລຢີການຫຼອກລວງການນໍາທາງຕົ້ນຕໍສໍາລັບ drones:
1) ສົ່ງຕໍ່ຫຼອກລວງ
ດັ່ງທີ່ຊື່ແນະນໍາ, ການຫຼອກລວງການສົ່ງຕໍ່ຫມາຍເຖິງການວາງເຄື່ອງຮັບ GNSS ປະມານເປົ້າຫມາຍທີ່ຈະຫລອກລວງ, ເກັບຮັກສາແລະສົ່ງຕໍ່ສັນຍານ GNSS ທີ່ແທ້ຈິງໄປຫາເປົ້າຫມາຍເພື່ອບັນລຸຜົນຂອງການຫຼອກລວງ. ໂດຍທົ່ວໄປແລ້ວ, ເນື່ອງຈາກການປະກົດຕົວທີ່ບໍ່ສາມາດຫຼີກລ່ຽງໄດ້ຂອງການຊັກຊ້າການມາຮອດໃນລະຫວ່າງການຮັບສັນຍານ, ການເກັບຮັກສາ, ການປຸງແຕ່ງແລະການສົ່ງຕໍ່, ການລົບກວນການສົ່ງຕໍ່ສາມາດແບ່ງອອກເປັນການຫຼອກລວງການສົ່ງຕໍ່ໂດຍກົງແລະການຫຼອກລວງການສົ່ງຕໍ່ທີ່ຊັກຊ້າໂດຍອີງໃສ່ການປະກົດຕົວຂອງມະນຸດໃນການຊັກຊ້າ. ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າການຫຼອກລວງສົ່ງຕໍ່ໂດຍກົງສົ່ງສັນຍານທີ່ແທ້ຈິງ, ມັນຫມາຍຄວາມວ່າຕາບໃດທີ່ສັນຍານໃນປະຈຸບັນສາມາດໄດ້ຮັບການ, ການຫຼອກລວງສາມາດດໍາເນີນການໄດ້. ດັ່ງນັ້ນ, ບໍ່ຈໍາເປັນຕ້ອງຮູ້ໂຄງສ້າງຂອງສັນຍານ pseudocode ລ່ວງຫນ້າ, ໂດຍສະເພາະໂດຍບໍ່ມີການເຂົ້າໃຈລາຍລະອຽດການປະຕິບັດສະເພາະຂອງລະຫັດ GPS M (Y). ດັ່ງນັ້ນ, ສັນຍານ GPS ທາງທະຫານສາມາດຖືກຫລອກລວງໂດຍກົງ. ຢ່າງໃດກໍ່ຕາມ, ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າຄວາມລ່າຊ້າຂອງສັນຍານການຫຼອກລວງທີ່ສົ່ງຕໍ່ໄປຫາຜູ້ຮັບແມ່ນສະເຫມີໄປຫຼາຍກ່ວາຄວາມລ່າຊ້າຂອງສັນຍານທີ່ແທ້ຈິງທີ່ມາຮອດ. ເນື່ອງຈາກບໍ່ສາມາດປ່ຽນແປງໂຄງສ້າງລະຫັດ pseudo ແລະພຽງແຕ່ມູນຄ່າການວັດແທກໄລຍະຫ່າງ pseudo ໃນລະຫວ່າງຂະບວນການຫຼອກລວງ, ຄວາມຍືດຫຍຸ່ນຂອງການຄວບຄຸມການແຊກແຊງການຫຼອກລວງໄປຂ້າງຫນ້າແມ່ນຂ້ອນຂ້າງບໍ່ດີ, ມັກຈະຮຽກຮ້ອງໃຫ້ມີກົນລະຍຸດການຄວບຄຸມການຊັກຊ້າຕໍ່ຫນ້າທີ່ສັບສົນຫຼາຍ, ແລະຍັງມີຂໍ້ຈໍາກັດບາງຢ່າງກ່ຽວກັບ. ທີ່ຕັ້ງຂອງອຸປະກອນສົ່ງຕໍ່. ສໍາລັບຜູ້ຮັບທີ່ບັນລຸການຕິດຕາມສັນຍານ GPS ທີ່ຫມັ້ນຄົງແລ້ວ, ການຂັດຂວາງການຫຼອກລວງໄປຂ້າງຫນ້າແມ່ນມີຜົນພຽງແຕ່ເມື່ອຄວາມລ່າຊ້າລະຫວ່າງສັນຍານສົ່ງຕໍ່ແລະສັນຍານໂດຍກົງຢູ່ສູນໄລຍະຂອງເສົາອາກາດຮັບເປົ້າຫມາຍແມ່ນຫນ້ອຍກວ່າຫນຶ່ງຊິບເນື່ອງຈາກໄລຍະລະຫັດ pseudo ຂອງມັນ. ໂມງຊັກຊ້າຢູ່ຫລັງສັນຍານທີ່ແທ້ຈິງ. ນອກຈາກນັ້ນ, ການຄົ້ນຄວ້າໄດ້ສະແດງໃຫ້ເຫັນວ່າເນື່ອງຈາກຄວາມຈິງທີ່ວ່າເຄື່ອງຮັບ GPS ໂດຍທົ່ວໄປຈະໄດ້ຮັບສັນຍານດາວທຽມຫຼາຍ (ໂດຍປົກກະຕິຫຼາຍກ່ວາ 10 ຊ່ອງ), ມັນມັກຈະຈໍາເປັນຕ້ອງໄດ້ຮັບແລະສົ່ງຕໍ່ສັນຍານດາວທຽມຫຼາຍຄັ້ງໃນລະຫວ່າງການຫຼອກລວງ. ຢ່າງໃດກໍຕາມ, ໃນທາງປະຕິບັດ, ຖ້າສະຖານີດຽວແລະວິທີເສົາອາກາດດຽວຖືກນໍາໃຊ້ສໍາລັບການສົ່ງຕໍ່, ມັນມັກຈະເປັນໄປບໍ່ໄດ້ທີ່ຈະສົ່ງຕໍ່ຫຼາຍກວ່າສີ່ຊ່ອງ (ບໍ່ລວມສີ່ຊ່ອງ) ຂອງສັນຍານດາວທຽມ, ແລະຫຼາຍສັນຍານຕ້ອງໄດ້ຮັບການສົ່ງຕໍ່ຢູ່ສະຖານີສົ່ງຕໍ່ຫນຶ່ງ, ເລື້ອຍໆສົ່ງຜົນໃຫ້ມີປະລິມານຂະຫນາດໃຫຍ່ຂອງສະຖານີສົ່ງຕໍ່, ການສົ່ງຕໍ່ສັນຍານ spoofing ຍັງຖືກກວດພົບໄດ້ງ່າຍ. ດັ່ງນັ້ນ, ການນໍາໃຊ້ການຫຼອກລວງຕໍ່ຫນ້າແມ່ນມັກຈະຖືກຈໍາກັດໃນການປະຕິບັດ.


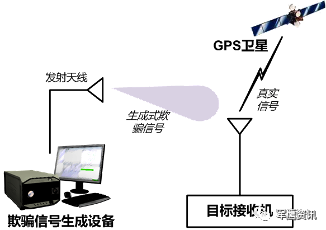
(2) ການຫຼອກລວງທົ່ວໄປ
ຫຼັກການພື້ນຖານຂອງການຫຼອກລວງໂດຍທົ່ວໄປແມ່ນການໃຊ້ອຸປະກອນການຫຼອກລວງເພື່ອຄິດໄລ່ຕົວກໍານົດການທີ່ຈໍາເປັນໃນເວລາຈິງເຊັ່ນການຊັກຊ້າໄລຍະລະຫັດ, Doppler ຜູ້ໃຫ້ບໍລິການ, ຂໍ້ຄວາມນໍາທາງ, ແລະອື່ນໆຂອງສັນຍານ GNSS ທີ່ຜູ້ໃຊ້ຕ້ອງການໄດ້ຮັບໃນຕໍາແຫນ່ງຜູ້ໃຊ້ທີ່ຄາດໄວ້ລ່ວງຫນ້າ. . ອີງຕາມການນີ້, ສັນຍານ GNSS ທີ່ບໍ່ຖືກຕ້ອງແມ່ນຖືກສ້າງຂຶ້ນໃນຈຸດນັ້ນແລະ radiated ກັບວັດຖຸຫຼອກລວງໂດຍຜ່ານສາຍອາກາດສົ່ງ, masking ສັນຍານ GNSS ທີ່ແທ້ຈິງທີ່ມີປະໂຍດພະລັງງານຂອງສັນຍານທີ່ບໍ່ຖືກຕ້ອງ, ເຮັດໃຫ້ມັນຄ່ອຍໆຕິດຕາມແລະເກັບກໍາໄລຍະລະຫັດ pseudo ທີ່ກໍານົດໄວ້ແລະ. ຜູ້ໃຫ້ບໍລິການ Doppler ຂອງສັນຍານການຫຼອກລວງ, ເພື່ອໃຫ້ເປົ້າຫມາຍທີ່ຖືກຫລອກລວງສາມາດໄດ້ຮັບຄ່າການວັດແທກລະດັບ pseudo ທີ່ບໍ່ຖືກຕ້ອງ, ແລະຫຼັງຈາກນັ້ນຄິດໄລ່ຂໍ້ມູນຕໍາແຫນ່ງທີ່ບໍ່ຖືກຕ້ອງ, ໃນທີ່ສຸດກໍ່ບັນລຸຈຸດປະສົງຂອງການຫຼອກລວງ. ຫຼັກການພື້ນຖານຂອງວິທີການນີ້ແມ່ນສະແດງຢູ່ໃນຮູບດັ່ງຕໍ່ໄປນີ້:
ການຫຼອກລວງໂດຍທົ່ວໄປຮຽກຮ້ອງໃຫ້ມີຄວາມເຂົ້າໃຈຢ່າງສົມບູນກ່ຽວກັບຂໍ້ມູນແລະຄວາມຖີ່ຂອງສັນຍານ GNSS, ເຊັ່ນໂຄງສ້າງລະຫັດ pseudo, ຂໍ້ຄວາມນໍາທາງ, ແລະອື່ນໆ, ເຮັດໃຫ້ມັນຍາກທີ່ຈະປະຕິບັດການຫຼອກລວງໂດຍທົ່ວໄປກ່ຽວກັບສັນຍານລະຫັດ P (Y). ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າການຫຼອກລວງແບບທົ່ວໄປໃຊ້ອຸປະກອນຂອງຕົນເອງເພື່ອສ້າງສັນຍານການຫຼອກລວງແລະບໍ່ອີງໃສ່ລະບົບ GNSS, ຝ່າຍຫລອກລວງສາມາດກໍານົດຂໍ້ຄວາມນໍາທາງແລະເວລາສົ່ງສັນຍານໄດ້ຢ່າງເສລີ, ເຊິ່ງເຮັດໃຫ້ສັນຍານການຫຼອກລວງສາມາດບັນລຸຜູ້ຮັບໄດ້ຢ່າງຊ້າໆ. ຫຼືລ່ວງຫນ້າຂອງສັນຍານທີ່ແທ້ຈິງ. ດັ່ງນັ້ນ, ການແຊກແຊງໂດຍທົ່ວໄປສາມາດຫລອກລວງຜູ້ຮັບເປົ້າຫມາຍໂດຍຜ່ານວິທີການຕ່າງໆເຊັ່ນ: ການປ່ຽນແປງມູນຄ່າການວັດແທກການທົດລອງທີ່ມາຮອດແລະການຂັດຂວາງກັບ ephemeris / almanacs ດາວທຽມ. ນອກຈາກນັ້ນ, ຍ້ອນວ່າສັນຍານ GNSS ແມ່ນຕົວຈິງຕາມລໍາດັບການແຜ່ກະຈາຍສັນຍານ spectrum ໂດຍກົງທີ່ເຮັດເລື້ມຄືນໃນໄລຍະເວລາລະຫັດທີ່ແນ່ນອນ, ການຄົ້ນຄວ້າໄດ້ສະແດງໃຫ້ເຫັນວ່າສັນຍານການຫຼອກລວງໂດຍທົ່ວໄປສາມາດຈັບຄູ່ລະຫັດລະຫັດກັບສັນຍານທີ່ແທ້ຈິງພາຍໃນໄລຍະເວລາລະຫັດ pseudo ທີ່ຍາວທີ່ສຸດ (1ms ສໍາລັບສັນຍານ GPS L1. ), ແລະດຶງສາຍຕິດຕາມລະຫັດ pseudo ຂອງຜູ້ຮັບເພື່ອຕິດຕາມສັນຍານການຫຼອກລວງໂດຍຜ່ານພະລັງງານທີ່ສູງກວ່າສັນຍານທີ່ແທ້ຈິງເລັກນ້ອຍ. ໃນຂະນະດຽວກັນ, ເນື່ອງຈາກລັກສະນະການຊໍ້າຊ້ອນຮອບວຽນຂອງລະຫັດ pseudo ໃນສັນຍານການຫຼອກລວງ, ຖ້າການຫຼອກລວງບໍ່ປະສົບຜົນສໍາເລັດພາຍໃນຮອບວຽນລະຫັດ pseudo, ສັນຍານການຫຼອກລວງຍັງສາມາດປະຕິບັດອັດຕະໂນມັດ traction ໃນວົງຈອນລະຫັດ pseudo ຕໍ່ໄປຈົນກ່ວາຜູ້ຮັບເປົ້າຫມາຍ. ຖືກນໍາພາຢ່າງສໍາເລັດຜົນ. ເມື່ອສັນຍານການຫຼອກລວງດຶງແຖບຕິດຕາມລະຫັດ pseudo ຂອງຜູ້ຮັບເປົ້າຫມາຍຢ່າງສໍາເລັດຜົນ, ພາກສ່ວນທີ່ແຊກແຊງສາມາດຄວບຄຸມເວລາແລະຕໍາແຫນ່ງຜົນໄດ້ຮັບຂອງຕົວຮັບເປົ້າຫມາຍໂດຍການປັບໄລຍະລະຫັດ pseudo ຂອງສັນຍານການຫຼອກລວງທີ່ຖ່າຍທອດ, ດັ່ງນັ້ນຈຶ່ງບັນລຸເປົ້າຫມາຍຂອງການຫລອກລວງເປົ້າຫມາຍ. ຜູ້ຮັບ. ດັ່ງນັ້ນ, ວິທີການນີ້ບໍ່ມີຄວາມຕ້ອງການສູງສໍາລັບສະຖານະປະຈຸບັນຂອງຜູ້ຮັບ. ມັນສາມາດຫລອກລວງທັງຜູ້ຮັບໃນສະຖານະການຈັບແລະຕົວຮັບໃນສະຖານະການຕິດຕາມທີ່ຫມັ້ນຄົງ. ເພາະສະນັ້ນ, ການປະຕິບັດຂອງການຫຼອກລວງໂດຍທົ່ວໄປແມ່ນມັກຈະເຂັ້ມແຂງ.
ເນື່ອງຈາກການນໍາໃຊ້ລະບົບນໍາທາງດາວທຽມຢ່າງເລິກເຊິ່ງໃນດ້ານຕ່າງໆຂອງຊີວິດສັງຄົມແລະການນໍາທາງທະຫານ, ສະຖານີຮັບສັນຍານດາວທຽມທີ່ໄດ້ຮັບສັນຍານທີ່ບໍ່ຖືກຕ້ອງແລະໄດ້ຮັບຜົນການກໍານົດເວລາແລະຕໍາແຫນ່ງທີ່ບໍ່ຖືກຕ້ອງອາດຈະນໍາໄປສູ່ຜົນສະທ້ອນທີ່ຮ້າຍແຮງ. ສະນັ້ນ, ຈຳນວນມາດຕະການຕອບໂຕ້ drone ໂດຍໃຊ້ເຕັກໂນໂລຊີຫຼອກລວງນຳທາງແມ່ນເພີ່ມຂຶ້ນຢ່າງບໍ່ຢຸດຢັ້ງ. ວັນທີ 4 ທັນວາປີ 2011, ກອງກຳລັງປ້ອງກັນທາງອາກາດອີຣ່ານອ້າງວ່າໄດ້ນຳໃຊ້ເຕັກໂນໂລຊີຫຼອກລວງເພື່ອຈັບເຮືອບິນສອດແນມບໍ່ມີຄົນຂັບ “RQ-170” ຂອງອາເມລິກາຢູ່ຕາມຊາຍແດນພາກຕາເວັນອອກຂອງປະເທດ. ຖ້າບົດລາຍງານນີ້ແມ່ນເປັນຄວາມຈິງ, ມັນຈະເປັນການນໍາໃຊ້ເຕັກໂນໂລຢີການຫຼອກລວງການນໍາທາງຄັ້ງທໍາອິດໃນມາດຕະການຕ້ານຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ. ຕາມຂ່າວແຈ້ງວ່າ, ໃນຖານະທີ່ເປັນປະເທດໃຫຍ່ດ້ານເຕັກໂນໂລຊີແລະອຸປະກອນສົງຄາມເອເລັກໂຕຣນິກ, ຣັດເຊຍມີທ່າທາງສູງທີ່ຈະນຳໃຊ້ເຕັກໂນໂລຊີຫຼອກລວງຢ່າງກວ້າງຂວາງທີ່ແນໃສ່ລະບົບ GPS ໃນຊຸມປີມໍ່ໆມານີ້. ອີງຕາມ C4ADS, ອົງການຈັດຕັ້ງທີ່ບໍ່ຫວັງຜົນກໍາໄລໃນສະຫະລັດ, ມີເກືອບ 10000 ເຫດການຫຼອກລວງ GPS ໃນລັດເຊຍໃນຊຸມປີມໍ່ໆມານີ້, ໂດຍສະເພາະໃນເວລາທີ່ປະທານາທິບໍດີລັດເຊຍ Putin ໄປຢ້ຽມຢາມເຂດທີ່ລະອຽດອ່ອນ, ສັນຍານ GPS ທີ່ຫຼອກລວງຈະປາກົດຢູ່ອ້ອມຮອບພວກເຂົາ. ນອກຈາກນັ້ນ, ອົງການດັ່ງກ່າວໄດ້ລາຍງານວ່າໃນມອດໂກ, ໂດຍສະເພາະຢູ່ໃກ້ກັບວັງ Kremlin, ນັກທ່ອງທ່ຽວໄດ້ພົບເຫັນສະຖານທີ່ຂອງພວກເຂົາຫຼາຍຄັ້ງທີ່ຖືກແຕ່ງຕັ້ງເປັນສະຫນາມບິນທີ່ຢູ່ຫ່າງຈາກ 32 ກິໂລແມັດ. ວິທີການນີ້ໂດຍລັດເຊຍໄດ້ຖືກພິຈາລະນາຢ່າງກວ້າງຂວາງເປັນມາດຕະການປ້ອງກັນເພື່ອຫຼີກເວັ້ນການຖືກໂຈມຕີໂດຍອາວຸດ GPS ນໍາທາງຂອງ NATO. ການວິເຄາະສະແດງໃຫ້ເຫັນວ່າ, ກອງທັບຣັດເຊຍສາມາດສະກັດກັ້ນການໂຈມຕີຂອງເຮືອບິນບໍ່ມີຄົນຂັບທີ່ແນເປົ້າໃສ່ຖານທີ່ໝັ້ນການທະຫານຂອງຕົນໃນຊີເຣຍ, ອາດເປັນຍ້ອນການນຳໃຊ້ເຕັກໂນໂລຊີຫຼອກລວງ GPS ບາງສ່ວນ.
ທີ່ຜ່ານມາ:ການວິເຄາະເທັກໂນໂລຍີການຄວບຄຸມ UAV